据外媒报道,美国宾夕法尼亚州立大学工程学院(Penn Engineering)的学生们推出一款全尺寸电动自动驾驶卡丁车——AV4EV。该车不仅支持多种灵活的传感和计算功能,还能够搭载一名人类驾驶员以收集额外的数据。
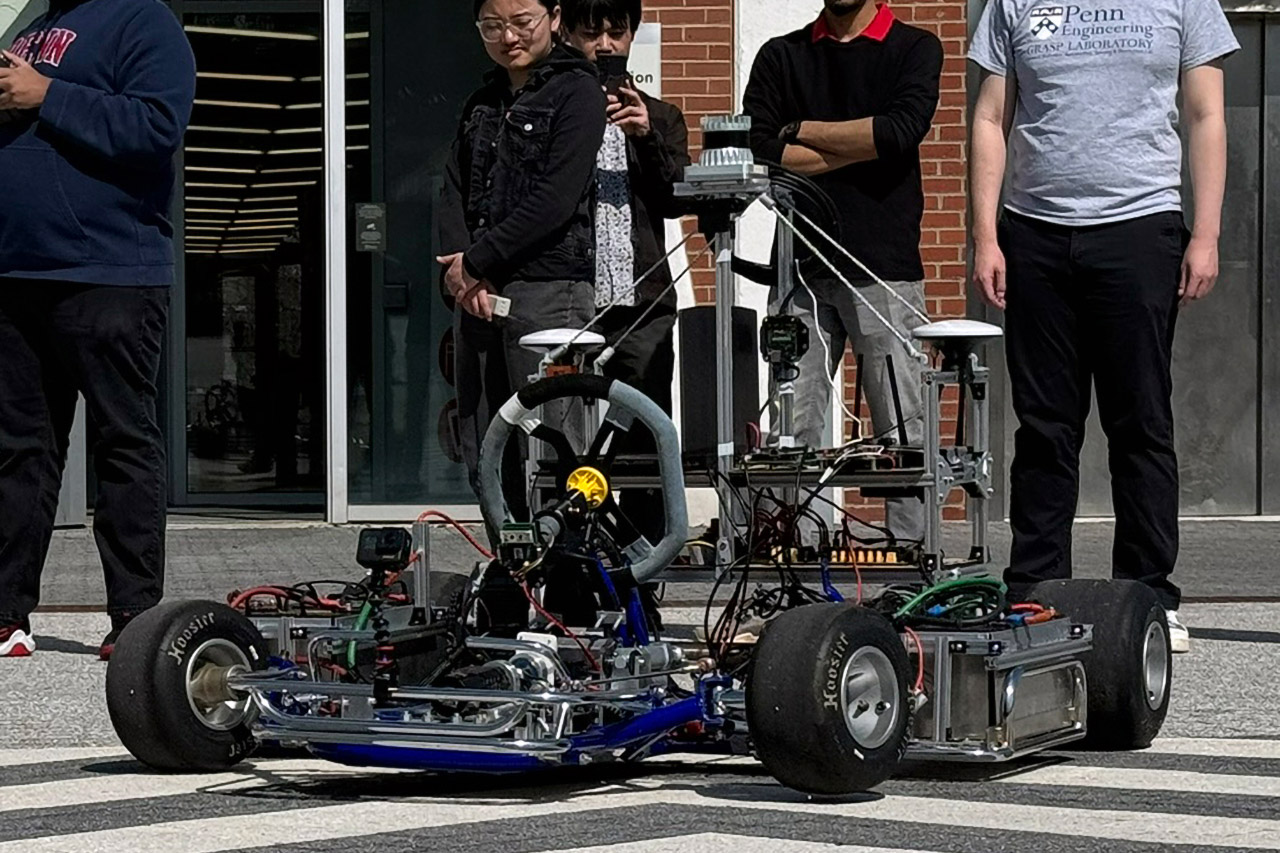
自动驾驶卡丁车AV4EV(图片来源:宾夕法尼亚州立大学工程学院)
背景
随着人们对感知、定位、规划、控制和预测等自动驾驶相关模块进行了广泛研究,深度学习(DL)和模仿学习(IL)等人机协同端到端(human-in-the-loop end-to- end)方法对于实现安全关键操作方面仍存在尚未解决的挑战。一方面,模块化算法设计的问题在于系统中的每个单独模块可能并不知道所需的“高层次”任务,从而导致信息遗漏和协调不足。而端到端法会将自动驾驶系统视为一个整体,直接将原始传感器的输入信息映射为控制端(油门、转向、制动)输出信息。此种方法不仅在赛车领域具有优势,还可以扩展至有意义的实际道路应用中。
为何需要设计卡丁车AV4EV
模仿学习(Imitation Learning,IL)已被证明是一种有效的端到端方法,可通过现有模型或人类参与等专家经验演示法来得到有效训练,但其安全性方面仍有很多需要验证的地方。其中一种评估方法是采用TORCS仿真模拟器、Udacity仿真模拟器以及CARLA仿真模拟器等开源驾驶模拟器。不过,虽然模拟器为算法的轻松开发和有效验证提供了支持,但它缺乏与现实世界的联系,需要在物理平台上进一步进行测试。另一种流行的方法是采用比例被缩小的车辆。例如,宾夕法尼亚州立大学工程学院的学生将强化学习(RL)与IL结合起来(称作深度模仿强化学习算法),并在一个1:20比例的自动驾驶遥控车(RC car)模型上测试了该算法。他们在一个名为F1Tenth、比例为1:10的赛车平台上,采用纯追踪模式专家经验演示策略,评估了四种IL算法。
不过,此种尺寸被缩小的平台有一个问题就是,它们的计算能力、感知能力有限,而且与全尺寸车辆相比,存在显著差异。在真实车辆上研发和实验该学习算法也是可行的,不过,此种平台设置通常需要大量的资金投入以及繁复的逆向工程。此外,由于存在较大的安全风险,很多大学和机构可能无法使用。
为了解决上述问题,基于Topkart USA公司提供的现有底盘,宾夕法尼亚州立大学工程学院的研究人员提出了一个比例为1:3的自动驾驶卡丁车平台的开放式设计。经过修改的卡丁车平台支持多种灵活的传感和计算功能,还能够搭载一名人类驾驶员,并且在技术和经济上对大学和研究机构都很友好。该平台弥合了遥控车和全尺寸车辆平台之间的差距,将研究范围从赛车比赛的模块化组件(modular pipeline)开发扩展到端到端传感与控制输出。此外,最重要的是不仅需要提供一个物理平台,还要提供一个能够弥合这一差距的开发工作流程。如果一个桥接平台的软件和工作流程与其对应的全尺寸平台相距甚远,所需的开发人员投入、移植时间、测试开销等资源会降低该桥接平台所提供的内在价值。因此,本研究专注于通过关注模块化容器化解决方案,为开发者提供用于各种用例的丰富配置选项,支持卡丁车平台软件(包括基础系统、中间件和软件包、应用层和模拟环境)的可重复开发、测试和部署工作流程。此种软件定义汽车(SDV)方法可以让部署在卡丁车平台上的应用,无需从头构建新应用,就可完全用于另一物理平台(如踏板车、叉车、汽车)。
概述
该款卡丁车的机电一体化系统被设计为一个模块化系统,由几个负责不同任务的子系统组成。主要有七个子系统:电力配电(Power Distribution,PD)、主控制器(Main Control,MC)、用户界面(User Interface,UI)、线控油门(Throttle-by-Wire,TBW)、线控制动(Brake-by-Wire,BBW)、线控转向(Steer-by-Wire,SBW)以及后窗窗台设计(Rear-Shelf Design,RSD)。
线控系统设计方法在汽车行业变得越来越受欢迎,其将传统的机械和液压控制系统替换成电子信号。去除传统的机械部件可以提升控制稳定性,增加设计灵活性,降低成本和提高效率。在该款卡丁车的线控设计中,除了PD和RSD外的所有子系统都使用独立PCB上的STM32 Nucleo开发板作为电子控制单元(ECU)。与现代汽车设计类似,该款卡丁车通过控制器局域网(CAN)实现通信,以在节点之间高效地交换信息。此外,此类模块化控制系统以非侵入性的方式与原装的卡丁车底盘集成在一起,很容易理解、构建和修改。
该项研究在以下方面做出了贡献:
1. 这是建立模块化电动汽车平台标准化开放式设计的首次尝试;
2. 其提供了完整了传感解决方案与开源软件,以执行与自动驾驶车辆相关的感知、定位、规划和控制任务;
3. 其提供了一个开放式的标准硬件解决方案,以让比例为1:3的卡丁车底盘能够弥合自动驾驶遥控车和全尺寸车辆之间的差距。



.jpg)




.jpg)


