许多动物都通过跳跃的方式在周围环境中移动。对这些动物来说,跳跃具有诸多好处,例如让它们到达更高的树枝、快速逃离捕食者,或在长距离旅程中更快地移动。很多机器人专家试图在开发过程中复制在动物中观察到的跳跃移动方式,由此得到的机器人可能在现实世界中具有有趣的应用。通过跳跃,机器人可以在复杂的地形上更快地移动,并接触它们以前可能无法到达的表面或环境。
(图片来源:浙江大学)
近年来出现的跳跃机器人采用不同的致动方式,如介电弹性体、液晶弹性体和软致动器。这些机器人中有一些取得了富有前景的结果,但大多数在跳跃高度和速度方面落后于技术高超的生物体。
据外媒报道,浙江大学的研究人员开发出新型超快速、磁驱动和双稳态的软体弹跳机器人(soft jumper),这种机器人表现出先进的跳跃性能,可以实现不同的跳跃移动方式,比以前推出的同等机器人系统跳得更高、更快。相关论文发表在期刊《科学机器人(Science Robotics)》上
软体弹跳机器人基于有弹性和可变形的材料,通常具有更大的抗冲击能力,以免其在跳跃时受损,例如这些研究人员开发的系统。然而,人们发现,一些现有弹跳机器人基于软材料,在刺激响应速度和从地面跳起来的速度方面存在局限性。
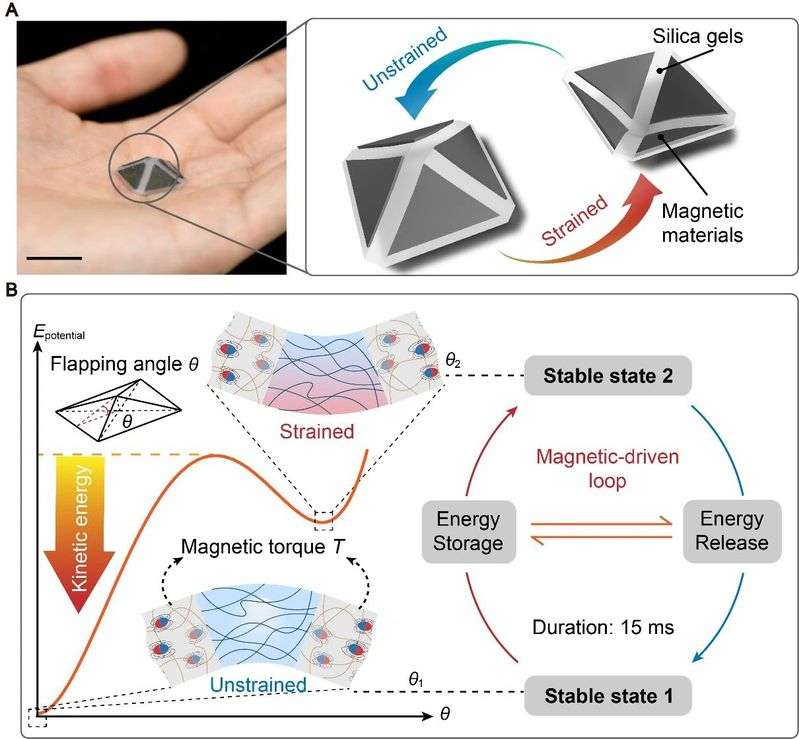
研究人员表示:“我们报告了一种磁驱动、超快速双稳态弹跳机器人。它表现出良好的跳跃性能(可以跳跃超过其108个身体高度,起跳速度超过每秒2米),并且比之前弹跳机器人的反应时间短(小于15微秒)。双稳态之间的突弹跳变过渡形成可重复循环,以利用超快释放的储存弹性能量。”
研究人员创建大小各异的机器人原型,并发现小一点的机器人更易受到空气阻力的影响,无法跳得像较大机器人一样高。然而,无论大小如何,这些机器人的起跳速度都是相似的。值得一提的是,该团队设计的这种弹跳机器人可以实现两种不同的移动方式,即大幅度跳跃(jumping)和连续性微跳(hopping)。研究人员在现实环境中进行测试,以展示这些移动方式的优势。
研究人员表示:“这些模式是通过调整磁场的持续时间和强度来控制的,以赋予双稳态弹跳机器人以强劲的移动能力。此外,它能够全方位跳跃,并且高度和距离可调。为了展示其在复杂环境中的性能,研究人员创建了一条具有两栖地形的真实管道。”
研究人员通过简单的运动任务中来测试机器人,包括连续性微跳过狭窄的管道,大跳过U形管,以及从水下大跳到水面以上。这项任务旨在模拟场景,使用机器人来清洁管道内的水。在这次初步实验中,该机械驱动机器人表现优异。未来,其基础设计可能有助于开发其他灵活的机器人系统,以用于广泛的现实世界应用。














