据外媒报道,马克斯·普朗克智能系统研究所(MPI-IS)的研究人员开发出六边形机器人组件(称为模块),可以像乐高一样拼装成高速机器人,并能够重新排列以实现不同的功能。在Christoph Keplinger的领导下,MPI-IS机器人材料部门研究团队将人造肌肉整合至嵌入磁铁的六边形外骨骼中,从而实现快速的机械和电气连接。相关论文《用于快速可重构高速机器人的六向电动液压模块(Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots)》发表在期刊《科学机器人(Science Robotics)》上。
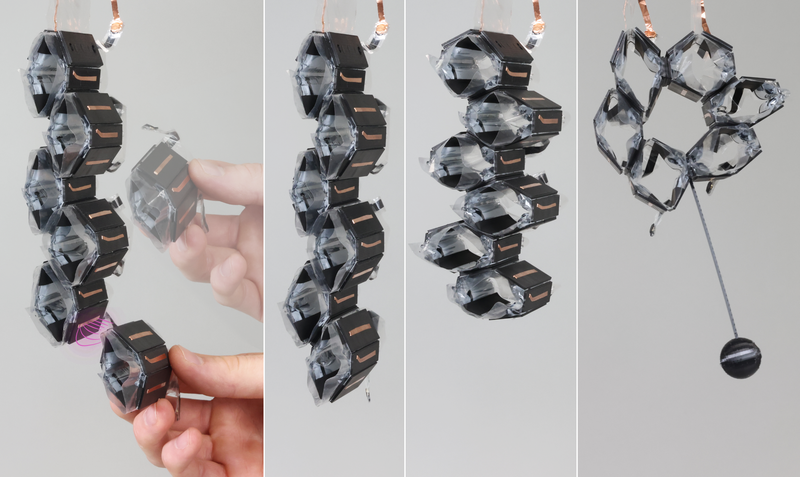
(图片来源:MPI-IS)
每个HEXEL模块的外骨骼由玻璃纤维制成的六块轻量化硬板组成,而六边形的内部关节由液压放大自愈静电(HASEL)人工肌肉驱动。向该模块施加高电压可以激活肌肉,从而旋转六边形的关节,并使其形状由长而窄变成又宽又平。
科罗拉多大学博尔德分校(University of Colorado Boulder)的访问研究员Ellen Rumley表示:“以这种方式将软组件和刚性组件组合在一起,可以实现高冲程和高速度。通过连接多个模块,我们可以创建新的机器人几何形状,并根据不断变化的需求重新调整它们的用途。”她和Zachary Yoder都是机器人材料系的博士生,也是该论文的共同第一作者。
该团队展示了可以使用HEXEL模块创建的许多行为。一组模块可以爬过狭窄的缝隙,而单个模块的启动速度非常快,可以跳到空中。多个模块连接成更大的结构,可以根据连接方式而产生不同的运动。例如,该团队将几个模块组合成一个快速滚动的机器人。
Yoder总结道:“总体而言,开发具有可重构功能的机器人非常有意义。这是一种可持续的设计选择,我们可以通过使用相同的组件来制造许多不同的机器人,而不是为了五种不同的用途而购买五种不同的机器人。由可重构模块制成的机器人可以根据需求重新排列,从而提供比专用系统更广泛的多功能性,这在资源有限的环境中是有益的。”