您现在的位置是:首页 > 玩车行家玩车行家
揭开人类并道的面纱:新模型帮助自动驾驶汽车像人类一样驾驶
admin 2024-11-07 玩车行家 已有3人查阅
导读据外媒报道,荷兰代尔夫特理工大学(Delft University of Technology,TU Delft)的科学家开发出新模型,可以更好地描述人类在高速公路上行驶时的行为。博士后研究员Olger Siebinga表示,目前的模型通常假设驾驶员不断尝试优化自己的行为,以尽可能快速安全地到达目的地,但情况并非总是如此。新模型可以更深入地了解高速公路上的人机互动,并可用于改进自动驾驶汽车。相关研究结果已发表于期刊《PNAS Nexus》。 图片来源:期刊《PNAS Nexus》 对于许多驾驶员来说,并道
据外媒报道,荷兰代尔夫特理工大学(Delft University of Technology,TU Delft)的科学家开发出新模型,可以更好地描述人类在高速公路上行驶时的行为。博士后研究员Olger Siebinga表示,目前的模型通常假设驾驶员不断尝试优化自己的行为,以尽可能快速安全地到达目的地,但情况并非总是如此。新模型可以更深入地了解高速公路上的人机互动,并可用于改进自动驾驶汽车。相关研究结果已发表于期刊《PNAS Nexus》。
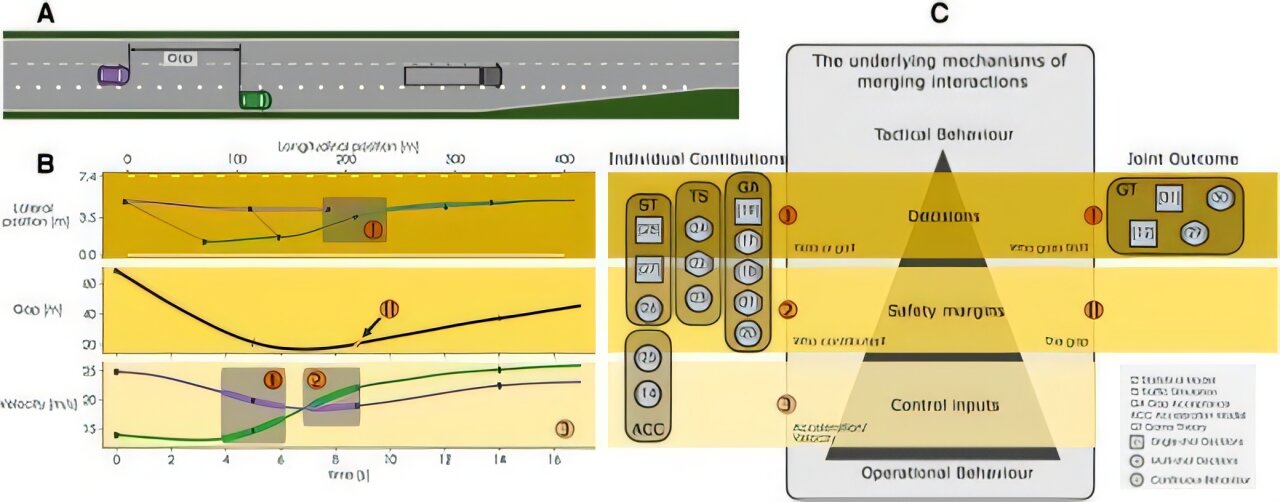
图片来源:期刊《PNAS Nexus》
对于许多驾驶员来说,并道上高速公路是一种常规行为,很少考虑其中涉及的诸多因素。但只有当尝试在计算机模型中模拟这种行为时,人类才会意识到并道实际上有多么复杂。
“目前的模型基于博弈论,该理论假设人们总是试图以最佳方式行事,以成为‘赢家’。但实际上,人们在大多数情况下的行为不同,”Siebinga解释说。他发现,驾驶员不一定想成为第一,而是优先考虑一个共同的目标:避免碰撞。
简化的并道场景
Siebinga与David Abbink教授和Arkady Zgonnikov助理教授共同提出了一种基于风险感知和沟通的新型交互模型。这是第一个从多个层面解释人类交互的模型:从控制输入(例如人们如何加速),到驾驶员在与其他车辆保持距离方面的安全裕度,再到谁先走的最终决定。这使得该模型对于自动驾驶汽车等应用更有用。
该模型的框架来自早期的一项实验,在该实验中,Siebinga让两个受试者同时参与简化的并道场景。他们只能加速或刹车,并且被一堵墙隔开,因此他们只能根据在电脑屏幕上看到的内容来做出行为。
“我们发现人们会根据沟通和风险认知来调整计划。他们通过将另一辆车的速度解读为沟通来构建情况图景,并据此估计风险。如果这种感知风险变得太高,司机就会改变他们的行为,例如加速或刹车,以实现安全的结果。”
了解人类行为
建模可以更好地理解人类行为。
“如果我们学会更好地理解我们决策背后的原因,我们就可以设计出更好的系统,让自动驾驶汽车以我们认为社会可接受的方式运行,”Siebinga表示。
事实上,这是自动驾驶面临的最大挑战之一:如何确保普通驾驶员理解和信任自动驾驶汽车?Siebinga的新模型有助于为安全和可接受的自动驾驶汽车奠定基础。
本文标签:
很赞哦! ()
上一篇:/6/654247.html
下一篇:/6/654249.html

