您现在的位置是:首页 > 玩车行家玩车行家
哥伦比亚大学开发新型水下机器人 通过自学习优化增强水下物体操控性能
admin 2024-11-12 玩车行家 已有3人查阅
导读近年来,机器人专家推出可在不同环境中完成任务的机器人系统。其中一些机器人可以在地面上抓取和移动物体,但水下机器人系统处理物体更具挑战性。据外媒报道,哥伦比亚大学(Columbia University)的研究人员开发出新型水下机器人AquaBot,可以在水下自主完成基本的物体操控任务。该机器人结合了可访问硬件和计算模型(基于从人类演示中提取数据进行训练)。相关论文发表在arXiv预印本服务器上。 (图片来源:哥伦比亚大学) 研究人员表示:“由于复杂的流体动力学和非结构化环境,水下机器人操作面临着重大挑战。
近年来,机器人专家推出可在不同环境中完成任务的机器人系统。其中一些机器人可以在地面上抓取和移动物体,但水下机器人系统处理物体更具挑战性。据外媒报道,哥伦比亚大学(Columbia University)的研究人员开发出新型水下机器人AquaBot,可以在水下自主完成基本的物体操控任务。该机器人结合了可访问硬件和计算模型(基于从人类演示中提取数据进行训练)。相关论文发表在arXiv预印本服务器上。
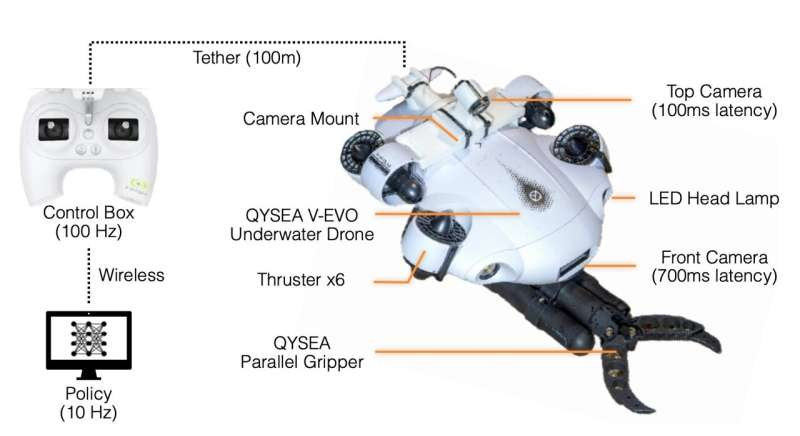
(图片来源:哥伦比亚大学)
研究人员表示:“由于复杂的流体动力学和非结构化环境,水下机器人操作面临着重大挑战。这导致大多数操作系统严重依赖于人类遥控。此次推出的AquaBot是一种完全自主的操控系统,结合人类示范行为克隆与自我学习优化以超越人类遥控性能。”
Aquabot机器人基于QYSEA V-EVO水下无人机。研究人员为这款无人机添加了QYSEA平行钳口夹持器和两个摄像头,这样它就可以在水下收集相关图像,并完成物体操控任务。研究人员还编写了代码,使机器人能够自主学习端到端视觉运动策略,从而指导它对水下物体的操控。计算模型在两个不同的阶段进行训练,可以规划和控制机器人动作。研究人员表示:“在第一阶段,我们将人类适应性提炼为闭环视觉运动策略。为此,我们记录了人类遥控机器人执行各种操作任务的演示,然后使用这些数据来训练视觉运动策略。通过缩短该策略的行动范围,我们有效地提高了其反应能力,这对于处理难以预料的水下动态十分重要。”
作为第二阶段训练的一部分,研究人员试图加快机器人学习新行为的速度。为了做到这一点,他们使用自我引导优化,这种方法允许系统使用从以往预测或决策中获得的反馈来自主调整其学习过程。研究人员表示:“在这一步骤中,我们反复执行学习到的策略,并使用基于代理的优化算法,将执行时间作为奖励来加速策略。这允许系统进一步优化人类演示数据中的次优参数(例如执行速度)。”
研究人员在一系列现实实验中对Aquabot进行了评估,以测试它完成不同物体操控任务的能力,包括在水下抓取之前未见过的岩石、将垃圾分类并放入不同的容器,以及取回模仿人体的大型可变形物体。该机器人在所有任务中都表现出色,且比人类操作员的完成速度更快。值得一得的是,借助底层自引导优化方法,根用户(root)在现实环境中获得更多经验时,可以不断改进其基础策略。
研究人员表示:“现实世界实验表明,AquaBot的自优化策略在速度上比人类操作员高出41%。在实现自主和自我改进水下操作系统方面,AquaBot迈出了富有前景的一步。”
该团队使用的硬件设计和软件都是开源的,可供全球其他计算机研究人员使用。未来,这种机器人系统可以进一步改进,并进行其他实验测试,最终部署于自然环境中以完成各种任务。例如,它可以在搜救任务中协助人类行为人,以及从海底收集垃圾、矿物或其他物体。
本文标签:
很赞哦! ()
上一篇:/6/662140.html
下一篇:/6/662142.html

